プログラムの実行 (執筆中)
実機実行
ビーゴの走行制御コントローラと PC とを接続し、ビーゴを走行させる方法について説明します。必要なデバイス類は
- ビーゴ筐体 (バッテリー付き、配線済み)
- PC (USB ポート、またはシリアルポートを持つ)
- 接続ケーブル (USB ケーブル、またはシリアルケーブル)
です。
URG の場合は、使用できるのが URG 付属のシリアルケーブルか USB の 5 pin ミニコネクタのみとなります。
ケーブル接続
使えるケーブルとしては、- USB ケーブル (Aコネクタ - Bコネクタ)
- シリアルのストレートケーブル (D-SUB 9 pin)
- シリアル-USB 変換ケーブル (シリアル: D-SUB 9 pin, USB: Aコネクタ)
です。以下が、そのサンプルの写真です。

USB ケーブル (A-B コネクタ)

USB ケーブル (巻取り可能なもの、お薦め♪)

USB ケーブル。少し伸ばしてみた状態

USB ケーブル (mini-5pin URG用)

シリアルケーブル (D-SUB 9pin: オス、メス)

USB-シリアル変換器 (シリアル: D-SUB 9 pin, USB: Aコネクタ)
また、USB ケーブルを用いて、ノートPC と URG, 走行制御コントローラを接続した例は以下の通りです。

USB接続の例
走行制御コントローラは、USB とシリアルポートの2つのコネクタを持っていますが、電源投入後に最初にパケットが送られてきたポートを使用します。
URG は、センサに USB が繋がれている場合、USB のみ使用できます。
接続デバイスの確認
USB 接続の場合、ケーブル接続後にビーゴに電源を投入したときに、USB ポートの認識が行われます。従って、ケーブルを接続しても、ビーゴの電源を投入しなければ走行制御コントローラ、URG センサの認識は行われません。
Windows 環境でのデバイス認識
Windows 環境の場合、認識したデバイスが COM の何番に割り振られたかは「デバイスマネージャ」から確認することができます。
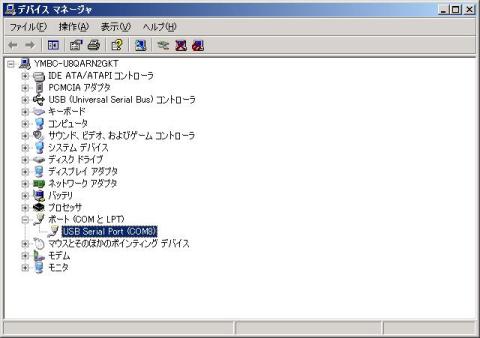
デバイスマネージャによる COM の確認
!!! Cygwin, MinGW の場合について !!! Cygwin だと、ttyS 扱い、になるんだっけか?
Linux 環境でのデバイス認識
Linux において接続したデバイスがどのように扱われたかを確認するには、カーネルメッセージを見る必要があります。そのコマンドは dmesg です。走行制御コントローラを USB 接続で用いるとする。
% dmesg ...(省略)... hub.c: new USB device 00:10.1-2, assigned address 5 usb.c: USB device 5 (vend/prod 0x403/0x6001) is not claimed by any active driver. usb.c: registered new driver serial usbserial.c: USB Serial support registered for Generic usbserial.c: USB Serial Driver core v1.4 usbserial.c: USB Serial support registered for FTDI SIO usbserial.c: USB Serial support registered for FTDI 8U232AM Compatible usbserial.c: USB Serial support registered for FTDI FT232BM Compatible usbserial.c: FTDI FT232BM Compatible converter detected usbserial.c: FTDI FT232BM Compatible converter now attached to ttyUSB0 (or usb/tts/0 for devfs) usbserial.c: USB Serial support registered for USB-UIRT Infrared Tranceiver usbserial.c: USB Serial support registered for Home-Electronics TIRA-1 IR Transceiver ftdi_sio.c: v1.3.5:USB FTDI Serial Converters Driver
長いですが、見るべきは最後から4行目の情報です。これより、新規に接続された USB デバイスを ttyUSB0 (又は usb/tts/0) に割り当てたことがわかります。これらファイルは通常 /dev/ 以下にありますので、プログラムを実行する場合に接続するポートは, /dev/ttyUSB0 となります。
プログラムの実行
以上より、走行制御用のポートに /dev/ttyUSB0 を使うことを指定してプログラムを実行します。
% ./followLine --run_port=/dev/ttyUSB0
!!! Linux における、今風のデバイスのパーミッション割り当てについて記述
シミュレータ実行 (執筆中)
!!! どのようなものか!!! 必要ライブラリ、ぽいこと
!!! 実行方法
