RunCtrlHub Class Reference
TCP/IP 先にて実ロボットを制御するための接続クラス. More...
#include <runCtrlHub.h>
Inheritance diagram for RunCtrlHub:
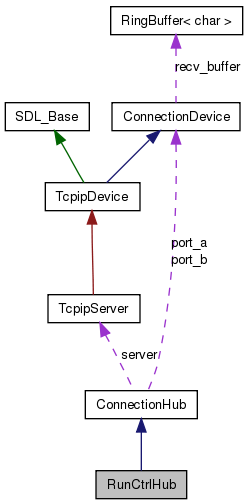
Collaboration diagram for RunCtrlHub:
Public Member Functions | |
| RunCtrlHub (int port, const char *device, long baudrate=115200) | |
| 接続待ちポート指定のコンストラクタ | |
| bool | update (void) |
| データの相互交換を行う | |
Detailed Description
TCP/IP 先にて実ロボットを制御するための接続クラス.Definition at line 19 of file runCtrlHub.h.
Constructor & Destructor Documentation
| RunCtrlHub::RunCtrlHub | ( | int | port, | |
| const char * | device, | |||
| long | baudrate = 115200 | |||
| ) |
接続待ちポート指定のコンストラクタ
接続が行われると、device, baudrate へのシリアル接続が行われる
- Parameters:
-
port [i] 接続待ちポート device [i] 接続デバイス baudrate [i] 接続ボーレート
Definition at line 13 of file runCtrlHub.cpp.
Member Function Documentation
| bool RunCtrlHub::update | ( | void | ) |
データの相互交換を行う
- Return values:
-
true 切断前状態 false 切断済み
Reimplemented from ConnectionHub.
Definition at line 24 of file runCtrlHub.cpp.
References VXV::GetTicks(), ConnectionHub::port_a, ConnectionHub::port_b, ConnectionHub::preUpdate(), ConnectionDevice::recv(), ConnectionDevice::send(), and ConnectionDevice::size().
The documentation for this class was generated from the following files:
- src/runCtrl/cpp/runCtrlHub.h
- src/runCtrl/cpp/runCtrlHub.cpp
