lines.cpp
連続直線への追従
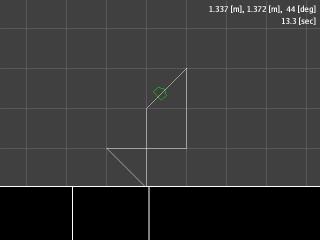
シミュレータによる実行結果
/* 連続直線への追従 Satofumi KAMIMURA $Id$ */ #include "vutils.h" #include "mRunCtrl.h" #include <stdio.h> #include <stdlib.h> int main(int argc, char *argv[]) { try { mRunCtrl run; if (initConnection(&run, argc, argv) < 0) { exit(1); } vmonitor::show(); vmonitor::setTimeMagnify(1.0); // 走行経路 std::deque<VXV::Position> lines; lines.push_back(VXV::Position(0, 0, deg(-45))); lines.push_back(VXV::Position(1000, -1000, deg(90))); lines.push_back(VXV::Position(1000, 1000, deg(45))); lines.push_back(VXV::Position(2000, 2000, deg(-90))); lines.push_back(VXV::Position(2000, 0, deg(180))); lines.push_back(VXV::Position(0, 0, deg(180))); // 走行経路の表示 std::deque<VXV::Grid3D> draw_lines; draw_lines.assign(lines.begin(), lines.end()); vmonitor::drawContLine(draw_lines, White); // 実際の走行処理 int follow_r = run.getCurveRadius(); run.followLine(lines.front()); while (lines.size() > 0) { VXV::followLinesUpdate(run, lines, follow_r); VXV::Delay(100); // Do something } run.stop(); VXV::Delay(1000); } catch (std::exception& e) { printf("exception: %s\n", e.what()); } return 0; }
