stopToObstacle.cpp
障害物にて停止 (ログの使用例)
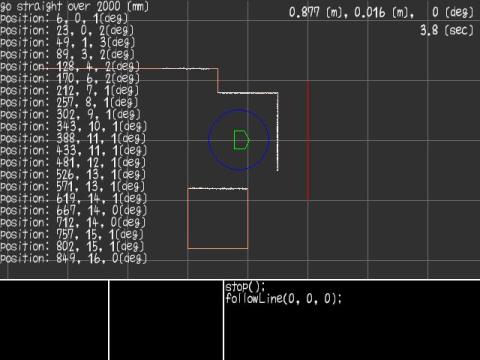
シミュレータによる実行結果
/* 障害物にて停止 (ログの使用例) Satofumi KAMIMURA $Id$ */ #include "mRunCtrl.h" #include "mURGCtrl.h" #include "vutils.h" #include <stdlib.h> enum { DangerAreaRadius = 600, }; // 物体を検出したら停止する領域の円を描画 static void drawDangerZone(const Position& pos) { static unsigned long pre_box_index = 0; vmonitor::clear(pre_box_index); pre_box_index = vmonitor::drawCircle(pos, DangerAreaRadius, Blue); } // 測定データ、筐体位置の描画 static void drawInformation(mURGCtrl& urg, mRunCtrl& run, bool draw = true) { static TicksPosition ticksPos; static unsigned long pre_urg_index = 0; // 現在位置の取得、表示 Position pos = run.getRunPosition(); if (draw) { vmonitor::printf("position: %d, %d, %d[deg]\n", pos.x, pos.y, pos.zt.to_deg()); } ticksPos.add(run.crd_position, run.crd_ticks); // 判定領域の表示 drawDangerZone(pos); // URG による周囲の情報を表示 urg.convert(ticksPos); vmonitor::clear(pre_urg_index); pre_urg_index = vmonitor::drawPoints(urg.crd_points, White); ticksPos.del_olderThan(urg.crd_ticks - 5000); } // 筐体周辺に物体がなければ true を返す static bool isSafeArea(mURGCtrl& urg, int radius) { static unsigned long pre_points_index = 0; int first = urg.rad2index(-60 * DEG2RAD); int last = urg.rad2index(+60 * DEG2RAD); int step = (last > first) ? +1 : -1; std::vector<Grid3D> points; bool safe = true; for (int i = first; i != last; i += step) { int length = urg.length[i]; if ((length > 20) && (length < radius)) { safe = false; int x = static_cast<int>(length * cos(urg.index2rad(i) + urg.crd_position.zt.to_rad())); int y = static_cast<int>(length * sin(urg.index2rad(i) + urg.crd_position.zt.to_rad())); Grid3D p = Grid3D(urg.crd_position.x + x, urg.crd_position.y + y, 0); points.push_back(p); } } vmonitor::clear(pre_points_index); if (!points.empty()) { pre_points_index = vmonitor::drawPoints(points, Red); } return safe; } // URG データの更新 static bool captureUpdate(mURGCtrl& urg, mRunCtrl& run, bool draw = true) { if (urg.capture() <= 0) { return false; } drawInformation(urg, run, draw); return true; } // 到達目標の線を描画 static void drawGoal(int length) { vmonitor::drawLine(Grid(length, -1000), Grid(length, +1000), Red); } int main(int argc, char *argv[]) { try { mRunCtrl run; mURGCtrl urg; if ((initConnection(&run, argc, argv) < 0) || (initConnection(&urg, argc, argv, true) < 0)) { exit(1); } urg.setOwnCrdToObject(&run); run.adjustSubTreeTicks(0); vmonitor::show(); //vmonitor::setTimeMagnify(0.5); // 一定距離以上、直進して停止 enum { MoveLength = 2000, ObstacleTimeout = 5000, }; vmonitor::printf("go straight over %d [mm]\n", MoveLength); drawGoal(MoveLength); bool quit = false; run.followLine(Position(0, 0, deg(0))); while (!quit && run.getLengthToLine(Position(MoveLength, 0, deg(0))) < 0) { // 周囲の情報を取得、表示 if (!captureUpdate(urg, run)) { break; } // 障害物があったら一時停止。ただしタイムアウトあり if (!isSafeArea(urg, DangerAreaRadius)) { // 現在の移動コマンドを待避 run.push_runState(); run.stop(); vmonitor::printf("detect obstacle!!!\n"); unsigned long ticks = vmonitor::getTicks(); do { VXV::Delay(100); captureUpdate(urg, run, false); if (vmonitor::getTicks() - ticks > ObstacleTimeout) { vmonitor::printf("obstacle timeout\n"); quit = true; break; } } while (!isSafeArea(urg, DangerAreaRadius)); // 待避しておいた移動コマンドを復帰して実行 run.pop_runState(); run.lastMoveCommand(); } VXV::Delay(100); } // 停止して終了 vmonitor::printf("stop & quit\n"); run.stop(); VXV::Delay(1000); vmonitor::clear(3); VXV::Delay(1000); } catch (std::exception& e) { printf("exception: %s\n", e.what()); } return 0; }
