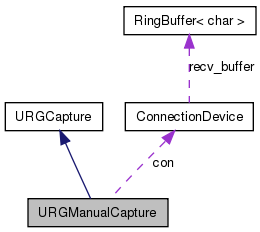
URGManualCapture Class Reference
URG の基本制御. More...
#include <urgManualCapture.h>
Public Member Functions | |
| const char * | what (void) |
| エラー状態を示す文字列を返す | |
| int | connect (const char *device, long baudrate) |
| センサへの接続を行う | |
| int | connectSocket (const char *host, short port) |
| ソケットに対して接続 | |
| void | disconnect (void) |
| センサとの接続を切断する | |
| bool | isConnected (void) |
| センサと接続されているかを返す | |
| void | set_recvTimeout (int timeout) |
| 受信時のタイムアウトを指定 | |
| void | setTimestampMode (bool withTimestamp) |
| タイムスタンプ取得モードに設定する | |
| virtual int | capture (long length[], int first_index, int last_index, int group, URGInterface::urgParams_t ¶ms, unsigned long *raw_timestamp=NULL) |
| センサからのデータ取得 | |
| int | getCaptureTimes (void) |
| センサからデータを取得した回数を返す | |
| int | send (const char *data, int size) |
| センサに直接コマンドを転送する | |
| int | recv (char *data, int maxsize, long timeout) |
| センサから直接メッセージを受け取る | |
| int | recv_line (char *data, int maxsize, long timeout) |
| センサから1行分のメッセージを直接受け取る | |
| int | laser (bool on) |
Protected Member Functions | |
| long | decode (const char *data, int data_byte) |
| int | recvCaptureData (long *data, size_t max_size, unsigned long *timestamp, URGInterface::urgParams_t ¶ms) |
| int | readLine (char *buffer, int timeout) |
| int | addRecvData (const char buffer[]) |
Protected Attributes | |
| bool | laser_on |
| int | remain_byte |
| char | remain_data [3] |
| bool | enableTimestamp |
| std::vector< long > | recv_data |
Friends | |
| class | URGCtrlTest |
Detailed Description
URG の基本制御.Definition at line 21 of file urgManualCapture.h.
Member Function Documentation
| const char * URGManualCapture::what | ( | void | ) | [virtual] |
エラー状態を示す文字列を返す
- Todo:
- 説明を記述
Implements URGCapture.
Definition at line 29 of file urgManualCapture.cpp.
| int URGManualCapture::connect | ( | const char * | device, | |
| long | baudrate | |||
| ) | [virtual] |
センサへの接続を行う
- Todo:
- 説明を記述
- Parameters:
-
device [i] 接続デバイス名 baudrate [i] 接続ボーレート
- Return values:
-
0 正常終了 戻り値 < 0 エラー
Implements URGCapture.
Definition at line 34 of file urgManualCapture.cpp.
References ConnectionDevice::connect(), ConnectionDevice::disconnect(), disconnect(), ConnectionDevice::flush(), ConnectionDevice::recv(), ConnectionDevice::send(), ConnectionDevice::setBaudrate(), and ConnectionDevice::what().
| int URGManualCapture::connectSocket | ( | const char * | host, | |
| short | port | |||
| ) | [virtual] |
ソケットに対して接続
- Todo:
- 説明を記述
- Parameters:
-
host [i] 接続ホスト port [i] 接続ポート
- Return values:
-
0 正常終了 戻り値 < 0 エラー
Implements URGCapture.
Definition at line 76 of file urgManualCapture.cpp.
References ConnectionDevice::connect(), disconnect(), and ConnectionDevice::what().
| void URGManualCapture::disconnect | ( | void | ) | [virtual] |
センサとの接続を切断する
- Todo:
- 説明を記述
Implements URGCapture.
Definition at line 87 of file urgManualCapture.cpp.
Referenced by connect(), and connectSocket().
| bool URGManualCapture::isConnected | ( | void | ) | [virtual] |
センサと接続されているかを返す
- Todo:
- 説明を記述
Implements URGCapture.
Definition at line 95 of file urgManualCapture.cpp.
References ConnectionDevice::isConnected().
| void URGManualCapture::set_recvTimeout | ( | int | timeout | ) | [virtual] |
受信時のタイムアウトを指定
- Parameters:
-
timeout [i] タイムアウト時間 [msec]
Implements URGCapture.
Definition at line 500 of file urgManualCapture.cpp.
| void URGManualCapture::setTimestampMode | ( | bool | withTimestamp | ) | [virtual] |
タイムスタンプ取得モードに設定する
- Todo:
- 説明を記述
- Parameters:
-
withTimestamp [i] タイムスタンプが利用できる場合 true
Implements URGCapture.
Definition at line 108 of file urgManualCapture.cpp.
References enableTimestamp.
| int URGManualCapture::capture | ( | long | length[], | |
| int | first_index, | |||
| int | last_index, | |||
| int | group, | |||
| URGInterface::urgParams_t & | params, | |||
| unsigned long * | raw_timestamp = NULL | |||
| ) | [virtual] |
センサからのデータ取得
- Todo:
- 引数についての説明を記述する

配列に格納されるデータと角度の関係(センサ真上より)
- Parameters:
-
length [o] 測定データが格納される配列 first_index [i] 測定データの要求開始位置 last_index [i] 測定データの要求終了位置 group [i] グルーピングを行うデータ個数 params [i] センサのパラメータ情報 raw_timestamp [o] センサのタイムスタンプ値
- Return values:
-
戻り値 > 0 取得したデータ配列の添え字の最大値 戻り値 < 0 エラー
Implements URGCapture.
Reimplemented in URGAutoCapture.
Definition at line 418 of file urgManualCapture.cpp.
References ConnectionDevice::flush(), ConnectionDevice::send(), and URGInterface::urgParams_t::sense_steps.
| int URGManualCapture::getCaptureTimes | ( | void | ) | [virtual] |
センサからデータを取得した回数を返す
- Todo:
- 説明を記述
Implements URGCapture.
Reimplemented in URGAutoCapture.
Definition at line 459 of file urgManualCapture.cpp.
| int URGManualCapture::send | ( | const char * | data, | |
| int | size | |||
| ) | [virtual] |
センサに直接コマンドを転送する
- Todo:
- 説明を記述
- Parameters:
-
data [i] 送信データ size [i] 送信データサイズ
- Return values:
-
戻り値 >= 0 送信バイト数 戻り値 < 0 エラー
Implements URGCapture.
Definition at line 464 of file urgManualCapture.cpp.
References ConnectionDevice::send().
| int URGManualCapture::recv | ( | char * | data, | |
| int | maxsize, | |||
| long | timeout | |||
| ) | [virtual] |
センサから直接メッセージを受け取る
- Todo:
- 説明を記述
- Parameters:
-
data [o] 受信データ maxsize [i] 受信可能サイズ timeout [i] タイムアウト [msec]
- Return values:
-
戻り値 >= 0 受信バイト数 戻り値 < 0 エラー
Implements URGCapture.
Definition at line 472 of file urgManualCapture.cpp.
References ConnectionDevice::recv().
| int URGManualCapture::recv_line | ( | char * | data, | |
| int | maxsize, | |||
| long | timeout | |||
| ) | [virtual] |
センサから1行分のメッセージを直接受け取る
- Todo:
- 説明を記述 改行を含む
- Parameters:
-
data [o] 受信データ maxsize [i] 受信可能サイズ timeout [i] タイムアウト [msec]
- Return values:
-
戻り値 >= 0 受信バイト数 戻り値 < 0 エラー
Implements URGCapture.
Definition at line 480 of file urgManualCapture.cpp.
References ConnectionDevice::recv().
Member Data Documentation
bool URGManualCapture::enableTimestamp [protected] |
The documentation for this class was generated from the following files:
- src/urgCtrl/cpp/urgManualCapture.h
- src/urgCtrl/cpp/urgManualCapture.cpp
