run_ctrl.h File Reference
走行制御ライブラリ More...
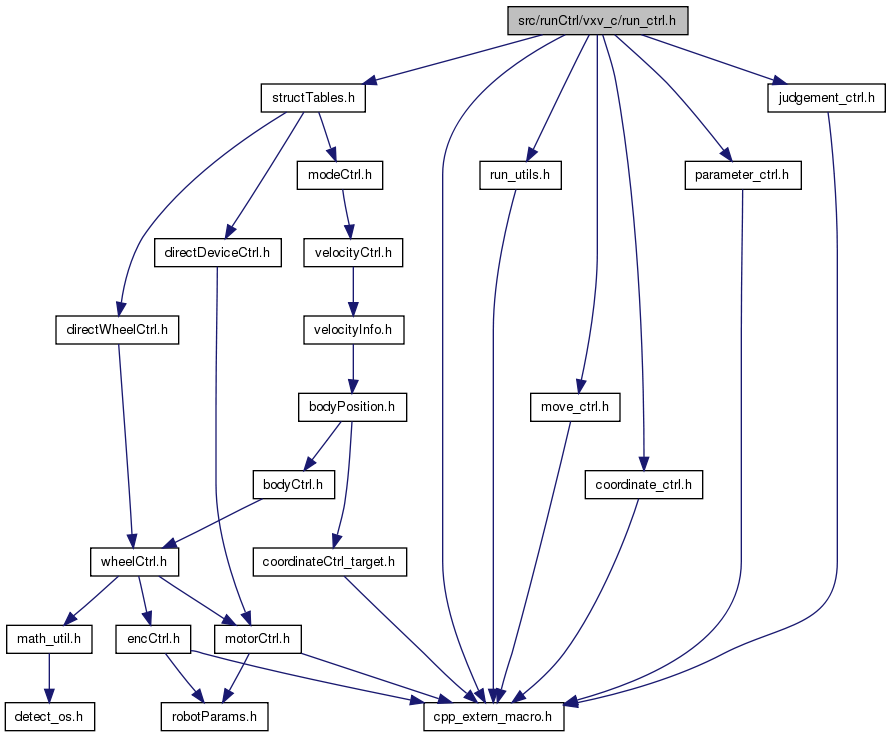
#include "structTables.h"
#include "run_utils.h"
#include "move_ctrl.h"
#include "coordinate_ctrl.h"
#include "parameter_ctrl.h"
#include "judgement_ctrl.h"
#include "cpp_extern_macro.h"
Include dependency graph for run_ctrl.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Defines | |
| #define | RUN_AUTO_PORT "dev/ttyS" |
| 自動探索を行う接続デバイス名 | |
Enumerations | |
| enum | { RUN_CTRL_BAUDRATE = 115200 } |
Functions | |
| int | initRunCtrl (int argc, char *argv[]) |
| 走行制御ライブラリの初期化 | |
| char * | run_getError (void) |
| エラー状態の取得 | |
Variables | |
| BEGIN_C_DECLS | |
| C++用のマクロ. | |
| END_C_DECLS | |
| C++用のマクロ. | |
Detailed Description
走行制御ライブラリ$Id$
Definition in file run_ctrl.h.
Function Documentation
| int initRunCtrl | ( | int | argc, | |
| char * | argv[] | |||
| ) |
走行制御ライブラリの初期化
- Parameters:
-
argc [i] main() の argc argv [i] main() の argv
- Return values:
-
0 正常終了 戻り値 < 0 エラー
Definition at line 206 of file run_ctrl.c.
References RUN_AUTO_PORT.
| char* run_getError | ( | void | ) |
