URG_Simulator Class Reference
URG センサデバイスのシミュレートクラス. More...
#include <urgSimulator.h>
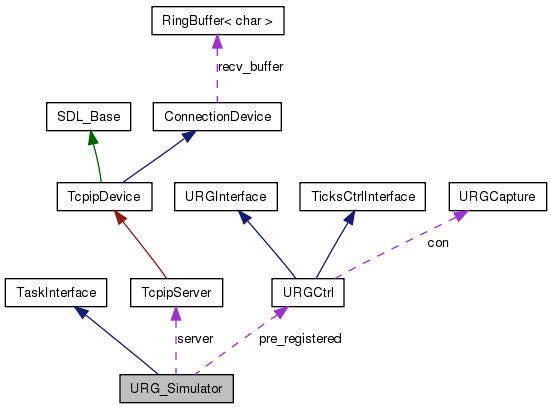
Inheritance diagram for URG_Simulator:

Collaboration diagram for URG_Simulator:
Classes | |
| class | ScanInfo |
Public Member Functions | |
| void | init (void) |
| 初期化 | |
| void | recv (void) |
| 受信処理 | |
| void | exec1msec (unsigned long total_msec) |
| 1msec 毎の処理 | |
| void | send (void) |
| 送信処理 | |
| bool | updatePosition (void) |
| 筐体位置を更新するか | |
| VXV::Position3D | getBodyPosition (const VXV::Position3D &position) |
| 更新された筐体位置 | |
| void | setURGObject (URGCtrl *urg_obj) |
| URGCtrl オブジェクトの受け取り. | |
| void | setURGType (const char *type) |
| URG の種類を指定. | |
| void | setEnvironment (const std::vector< crd_polygon_t > &objs) |
| 環境情報の受け取り | |
Detailed Description
URG センサデバイスのシミュレートクラス.
- Todo:
- params.rotate_direction を適切に処理
Definition at line 27 of file urgSimulator.h.
Member Function Documentation
| void URG_Simulator::exec1msec | ( | unsigned long | total_msec | ) | [virtual] |
1msec 毎の処理
- Parameters:
-
total_msec [i] タイムスタンプ
Implements TaskInterface.
Definition at line 52 of file urgSimulator.cpp.
| bool URG_Simulator::updatePosition | ( | void | ) | [inline, virtual] |
筐体位置を更新するか
- Returns:
- 筐体位置を更新する場合に true
Implements TaskInterface.
Definition at line 66 of file urgSimulator.h.
| VXV::Position3D URG_Simulator::getBodyPosition | ( | const VXV::Position3D & | position | ) | [inline, virtual] |
更新された筐体位置
- Parameters:
-
position [i] 更新前の筐体位置
Implements TaskInterface.
Definition at line 67 of file urgSimulator.h.
| void URG_Simulator::setURGObject | ( | URGCtrl * | urg_obj | ) |
URGCtrl オブジェクトの受け取り.
- Parameters:
-
urg_obj [i] URGCtrl オブジェクト
Definition at line 82 of file urgSimulator.cpp.
Referenced by mURGCtrl::connect().
| void URG_Simulator::setURGType | ( | const char * | type | ) |
URG の種類を指定.
- Parameters:
-
type [i] 種類を示す文字列
Definition at line 219 of file urgSimulator.cpp.
Referenced by mURGCtrl::connect().
The documentation for this class was generated from the following files:
- src/monitor/cpp/urgSimulator.h
- src/monitor/cpp/urgSimulator.cpp
