|
趣味で作ってるロボット用ソフトウェア
|
|
趣味で作ってるロボット用ソフトウェア
|
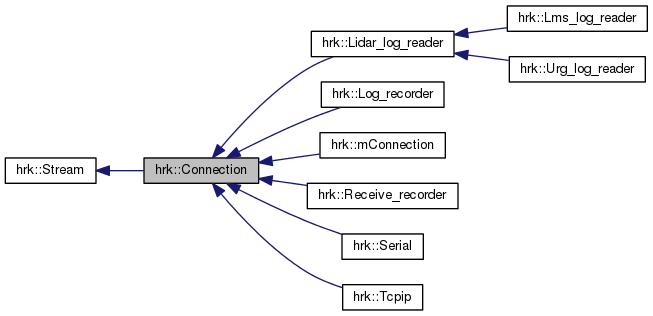
接続のインターフェース More...
#include <Connection.h>
Public Types | |
| enum | { Timeout_infinity = -1 } |
Public Member Functions | |
| virtual const char * | what () const =0 |
| 状態を示すメッセージを返す More... | |
| virtual bool | change_baudrate (long baudrate)=0 |
| ボーレートの変更 More... | |
| virtual void | ungetc (int ch)=0 |
| 1文字だけ受信バッファに書き戻す | |
 Public Member Functions inherited from hrk::Stream Public Member Functions inherited from hrk::Stream | |
| virtual bool | is_open () const =0 |
| 受信 More... | |
| virtual void | close ()=0 |
| 接続を閉じる More... | |
| virtual int | write (const char *data, size_t data_size)=0 |
| データの送信 More... | |
| virtual int | read (char *data, size_t max_data_size, int timeout)=0 |
| データの受信 More... | |
接続のインターフェース
アクセス用メソッドを定義する。ただし open() は扱うデバイスによって引数の数が変わる可能性があるため、この実装を行うインターフェースが提供ことにする。
| anonymous enum |
| Enumerator | |
|---|---|
| Timeout_infinity |
read() で無限に受信を待つ場合に利用する |
|
pure virtual |
状態を示すメッセージを返す
Implemented in hrk::Serial, hrk::Log_recorder, hrk::Tcpip, hrk::Lms_log_reader, hrk::Urg_log_reader, hrk::Receive_recorder, and hrk::mConnection.
|
pure virtual |
ボーレートの変更
| [in] | baudrate | ボーレート [bps] |
| true | 成功 |
| false | エラー |
Implemented in hrk::Serial, hrk::Log_recorder, hrk::Tcpip, hrk::Lms_log_reader, hrk::Urg_log_reader, hrk::Receive_recorder, and hrk::mConnection.
 1.8.6
1.8.6

