|
|
virtual bool | load (const std::string &log_file)=0 |
| |
|
virtual Lidar::measurement_t | log_measurement_type ()=0 |
| |
|
virtual void | log_range (int &first_step, int &last_step, int &group_steps)=0 |
| |
|
virtual void | log_scans (int &scan_times, int &scan_skips)=0 |
| |
|
virtual size_t | total_sec () const =0 |
| |
|
virtual size_t | total_scans () const =0 |
| |
|
virtual bool | scan_data (size_t scan_index, long &total_play_second, long &msec_to_next_scan)=0 |
| |
|
virtual bool | reload ()=0 |
| |
|
virtual bool | set_next_scans (int scan_index)=0 |
| |
| virtual const char * | what () const =0 |
| | 状態を示すメッセージを返す More...
|
| |
| virtual bool | change_baudrate (long baudrate)=0 |
| | ボーレートの変更 More...
|
| |
|
virtual void | ungetc (int ch)=0 |
| | 1文字だけ受信バッファに書き戻す
|
| |
| virtual bool | is_open () const =0 |
| | 受信 More...
|
| |
| virtual void | close ()=0 |
| | 接続を閉じる More...
|
| |
| virtual int | write (const char *data, size_t data_size)=0 |
| | データの送信 More...
|
| |
| virtual int | read (char *data, size_t max_data_size, int timeout)=0 |
| | データの受信 More...
|
| |
The documentation for this class was generated from the following file:
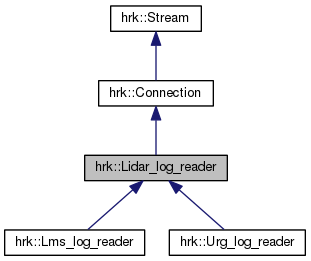
 Public Member Functions inherited from hrk::Connection
Public Member Functions inherited from hrk::Connection 1.8.6
1.8.6

