|
趣味で作ってるロボット用ソフトウェア
|
|
趣味で作ってるロボット用ソフトウェア
|
Roomba の移動制御 More...
#include <stdexcept>#include <cassert>#include "Roomba_driver.h"#include "Differential_drive.h"#include "Constant_acceleration.h"#include "connection_utils.h"#include "point_utils.h"#include "Thread.h"#include "Mutex.h"#include "Serial.h"#include "delay.h"#include "ticks.h"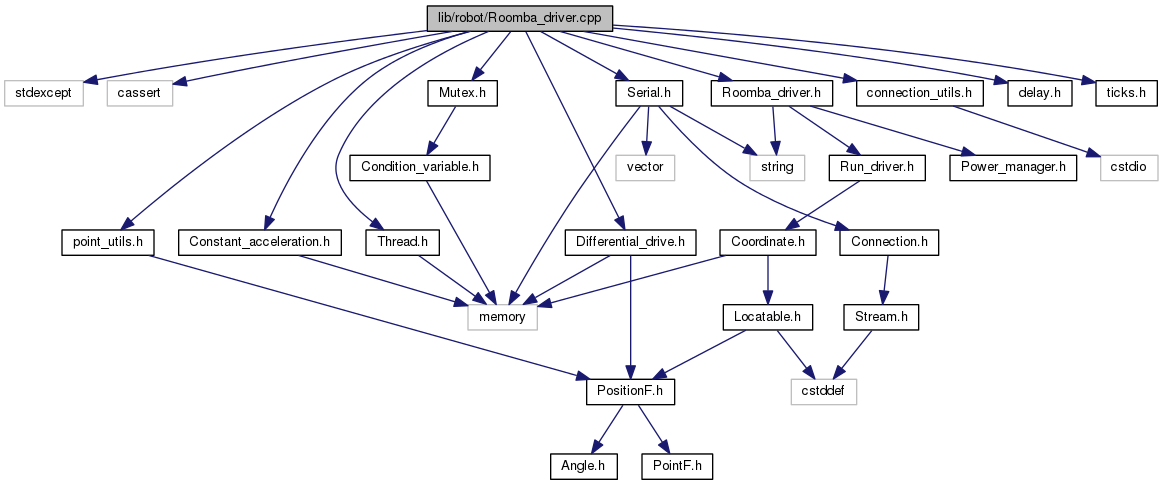
Enumerations | |
| enum | { Default_timeout = 100, Roomba_system_cycle = 15, Roomba_1m_counts = 2229, Roomba_1rotate_counts = 3500 } |
| enum | opcode_t { Start_command = 128, Safe_command = 131, Full_command = 132, Motors_command = 138, Dock_command = 143, Drive_direct_command = 145, Stream_command = 148, Query_list_command = 149, Pause_resume_command = 150, Power_command = 133 } |
| ROI のコマンド | |
| enum | packet_id_t { Battery_current_id = 23, OI_mode_id = 35, Encoder_counts_left = 43, Encoder_counts_right = 44 } |
| 受信パケット Id | |
| enum | roomba_mode_t { Unknown_mode = -1, Off_mode = 0, Passive_mode = 1, Safe_mode = 2, Full_mode = 3 } |
| Roomba のモード | |
 1.8.6
1.8.6

