|
趣味で作ってるロボット用ソフトウェア
|
|
趣味で作ってるロボット用ソフトウェア
|
Roomba のサンプル用の共通関数 More...
#include <iostream>#include "roomba_utils.h"#include "Serial.h"#include "delay.h"#include <cstdio>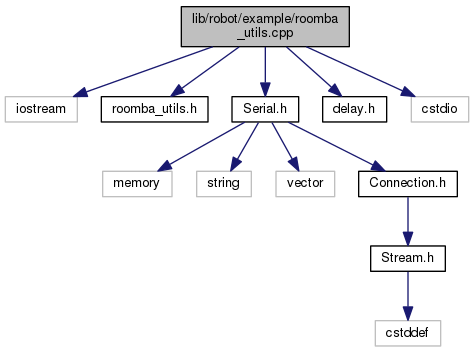
Functions | |
| void | change_to_full_mode (Connection *connection) |
| Full モードに変更する | |
| void | change_to_passive_mode (Connection *connection) |
| Passive モードに変更する | |
| Connection * | roomba_open (const char *device) |
| ルンバに接続する | |
| void | print_encoder_values (Connection *connection) |
| エンコーダの値を表示し続ける | |
Roomba のサンプル用の共通関数
 1.8.6
1.8.6

