RunInterface Class Reference
走行制御コマンドのインターフェース定義 More...
#include <runInterface.h>
Public Member Functions | |
| virtual const char * | what (void)=0 |
| エラー状態を示す文字列を返す | |
| virtual int | connect (const char *device, long baudrate)=0 |
| ポート指定の接続を行う | |
| virtual int | connect (int argc, char *argv[])=0 |
| 引数の内容を評価して接続を行う | |
| virtual void | disconnect (void)=0 |
| ポートとの接続を切断する | |
| virtual void | push_runState (void)=0 |
| 走行状態の待避 | |
| virtual void | pop_runState (void)=0 |
| 走行状態の復帰 | |
| virtual VXV::Position3D | getLocalPosition (void)=0 |
| モジュール内座標系における推定自己位置を返す | |
| virtual VXV::Position | getRunPosition (const CoordinateCtrl *crd)=0 |
| 推定自己位置を返す | |
| virtual void | adjustRunPosition (const VXV::Position &position, const CoordinateCtrl *crd)=0 |
| 推定自己位置の更新 | |
| virtual void | coordinateUpdateDetect (bool on)=0 |
| 座標系変更の影響を設定 | |
| virtual void | servoCtrl (bool on)=0 |
| サーボ制御 | |
| virtual void | stop (void)=0 |
| 移動停止 | |
| virtual void | followLine (const VXV::Position &position, const CoordinateCtrl *crd)=0 |
| 直線追従 | |
| virtual void | followCircle (const VXV::Grid ¢er, int radius, const CoordinateCtrl *crd)=0 |
| 円弧追従 | |
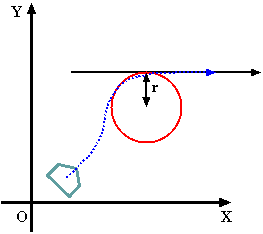
| virtual void | followCircleOnTangent (const VXV::Position &position, int radius, const CoordinateCtrl *crd)=0 |
| 接線指定の円弧に追従 | |
| virtual void | stopToLine (const VXV::Position &position, const CoordinateCtrl *crd)=0 |
| 停止直線の指定 | |
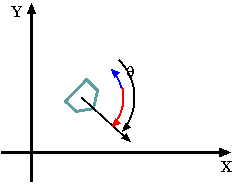
| virtual void | rotateToDirection (const VXV::Direction &direction, const CoordinateCtrl *crd)=0 |
| 指定角度方向に回転 | |
| virtual void | rotateAngle (const VXV::Direction &direction)=0 |
| 指定角度だけ回転 | |
| virtual void | spin (const VXV::Direction &velocity)=0 |
| 連続転回 | |
| virtual void | lastMoveCommand (const CoordinateCtrl *crd)=0 |
| 過去の移動コマンドを再発行 | |
| virtual bool | isStable (void)=0 |
| 移動の制御状態が安定しているかを返す | |
| virtual int | getLengthToGrid (const VXV::Grid &grid, const CoordinateCtrl *crd)=0 |
| virtual int | getLengthToBody (const VXV::Grid &grid, const CoordinateCtrl *crd)=0 |
| 指定位置と推定自己位置との距離を返す | |
| virtual int | getLengthToLine (const VXV::Position &line, const CoordinateCtrl *crd)=0 |
| 指定直線に垂直な直線と推定自己位置との距離を返す | |
| virtual VXV::Direction | getAngleToDirection (const VXV::Direction &t, const CoordinateCtrl *crd)=0 |
| 指定角度との差を返す | |
| virtual int | getStraightVelDiff (int mm_vel)=0 |
| 指定並進速度との差を返す | |
| virtual VXV::Direction | getRotateVelDiff (const VXV::Direction &t)=0 |
| 指定回転速度との差を返す | |
| virtual void | setStraightRefVel (int mm_sec)=0 |
| 目標並進速度を設定 | |
| virtual void | setStraightRefAcc (int mm_acc)=0 |
| 目標並進加速度を設定 | |
| virtual void | setRotateRefVel (const VXV::Direction &rotate_vel)=0 |
| 目標角速度を設定 | |
| virtual void | setRotateRefAcc (const VXV::Direction &rotate_acc)=0 |
| 目標角加速度を設定 | |
| virtual void | setCurveRadius (int mm)=0 |
| 追従時の曲率を設定 | |
| virtual int | getCurveRadius (void)=0 |
| 追従時の曲率の設定を取得 | |
| virtual int | getStraightVel (void)=0 |
| 並進速度の取得 | |
| virtual VXV::Direction | getRotateVel (void)=0 |
| 回転速度の取得 | |
Detailed Description
走行制御コマンドのインターフェース定義Definition at line 20 of file runInterface.h.
Member Function Documentation
| virtual int RunInterface::connect | ( | const char * | device, | |
| long | baudrate | |||
| ) | [pure virtual] |
ポート指定の接続を行う
通信に使用するポートをプログラム中で指定する場合に用いる
- Parameters:
-
device [i] 接続デバイス名 baudrate [i] 接続ボーレート
- Return values:
-
0 正常終了 戻り値 < 0 エラー
RunCtrl run; if (run.connect("/dev/ttyS0") < 0) { printf("RunCtrl::connect: %s\n", run.what()); exit(1); }
Implemented in mRunCtrl, and RunCtrl.
Referenced by VXV::initConnection().
| virtual int RunInterface::connect | ( | int | argc, | |
| char * | argv[] | |||
| ) | [pure virtual] |
引数の内容を評価して接続を行う
引数は、argv[1] から評価される
プログラム引数から通信に使用するポートを決定する場合に用いる
- Parameters:
-
argc [i] 引数の個数 argv [i] 引数文字列を格納した配列
| virtual void RunInterface::disconnect | ( | void | ) | [pure virtual] |
ポートとの接続を切断する
ポートとの接続を切断する
使用例
RunCtrl run; run.connect(argc, argv); ... run.disconnect();
Implemented in RunCtrl.
| virtual void RunInterface::push_runState | ( | void | ) | [pure virtual] |
| virtual void RunInterface::pop_runState | ( | void | ) | [pure virtual] |
走行状態の復帰
待避しておいた走行状態を復帰する。これにより、現在の走行パラメータ設定、及び直前発行コマンドを再発行するための情報が待避しておいたものに置き換わる
Implemented in RunCtrl.
| virtual VXV::Position3D RunInterface::getLocalPosition | ( | void | ) | [pure virtual] |
| virtual VXV::Position RunInterface::getRunPosition | ( | const CoordinateCtrl * | crd | ) | [pure virtual] |
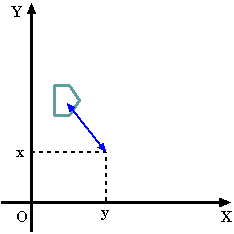
推定自己位置を返す
指定座標系からみたロボット位置を返す
- Parameters:
-
crd [i] 座標系
- Returns:
- 指定座標系におけるロボットの推定自己位置
指定座標系におけるロボット位置
仕様例
#include <runCtrl.h> #include <typePrint.h> int main(int argc, argv) { RunCtrl run; run.connect(argc, argv); std::cout << run.getRunPosition() << std::endl; ...
Implemented in RunCtrl.
| virtual void RunInterface::adjustRunPosition | ( | const VXV::Position & | position, | |
| const CoordinateCtrl * | crd | |||
| ) | [pure virtual] |
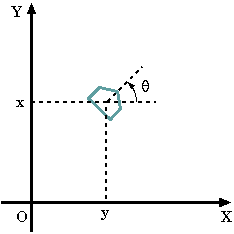
推定自己位置の更新
ロボット位置を指定座標系の指定位置にあるように変更する
- Parameters:
-
position [i] 修正後の位置 crd [i] 座標系
ロボットの管理位置を修正
Implemented in RunCtrl.
| virtual void RunInterface::coordinateUpdateDetect | ( | bool | on | ) | [pure virtual] |
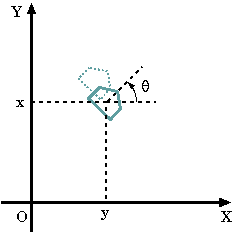
座標系変更の影響を設定
座標系の変更が、移動中のコマンドに影響を与えるかどうかを設定する。
- Parameters:
-
on [i] 座標系の変更が走行中の経路に影響を与える場合 true
run.followLine(VXV::Position(0, 0, deg(0))); VXV::Delay(1000); // ロボット位置を (0, 0, 90[deg]) という風に再設定する run.adjustRunPosition(VXV::Position(0, 0, deg(90))); // 以前の評価が run.coordinateUpdateDetect(false) であれば、 // ロボットの移動経路は変更されない // 以前の評価が run.coordinateUpdateDetect(true) であれば、 // ロボットの移動経路は新しい座標系の (0, 0, deg(0)) の直線に // 追従するように更新される
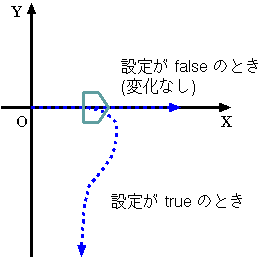
設定による走行経路の違い
Implemented in RunCtrl.
| virtual void RunInterface::servoCtrl | ( | bool | on | ) | [pure virtual] |
| virtual void RunInterface::stop | ( | void | ) | [pure virtual] |
移動停止
標準加速度で速度 0 まで減速する
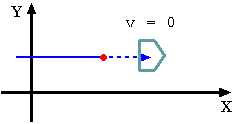
コマンド発行後、しばらくして停止
使用例
RunCtrl run; run.connect(argc, argv); // 3秒だけ前進して、停止 run.followLine(VXV::Position(0, 0, deg(0)), &run.FS); VXV::Delay(5000); run.stop();
| virtual void RunInterface::followLine | ( | const VXV::Position & | position, | |
| const CoordinateCtrl * | crd | |||
| ) | [pure virtual] |
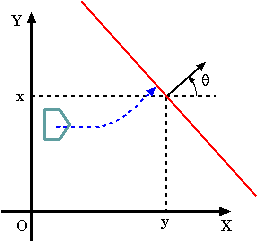
直線追従
座標系の指定された点を通る指定角度の直線へ追従走行する
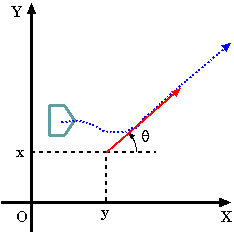
指定直線経路への追従
- Parameters:
-
position [i] 追従直線を指定 crd [i] 座標系
RunCtrl run; run.connect(argc, argv); // 座標系の点 (0, 0) を通り、45度の向きの直線経路に対して追従走行 run.followLine(VXV::Position(0, 0, deg(45)));
| virtual void RunInterface::followCircle | ( | const VXV::Grid & | center, | |
| int | radius, | |||
| const CoordinateCtrl * | crd | |||
| ) | [pure virtual] |
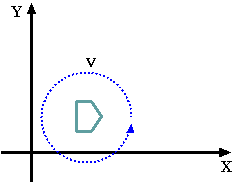
円弧追従
座標系の指定された点を中心とする半径の円へ追従走行する
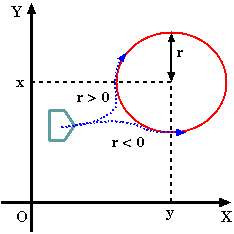
指定円弧経路への追従
- Parameters:
-
center [i] 追従円弧の中心位置 radius [i] 追従円の半径 [mm] (radius > 0 で CW, radius < 0 で CCW) crd [i] 座標系
RunCtrl run; run.connect(argc, argv); // 中心が (500, 500) で半径 500 [mm] の円の軌跡に時計回りで追従走行 run.followLine(VXV::Grid(500, 500), 500);
| virtual void RunInterface::followCircleOnTangent | ( | const VXV::Position & | position, | |
| int | radius, | |||
| const CoordinateCtrl * | crd | |||
| ) | [pure virtual] |
接線指定の円弧に追従
指定直線に接する半径 r の円弧に追従
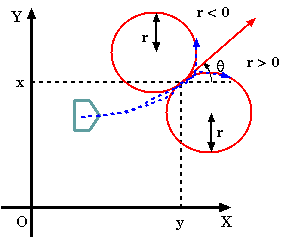
指定円弧経路への追従
- Parameters:
-
position [i] 接点を指定 radius [i] 追従円の半径 (radius > 0 で CW, radius < 0 で CCW) crd [i] 座標系
RunCtrl run; run.connect(argc, argv); // 座標系 (1000, 0) の点に接する円の軌跡に時計回りで追従走行 // (結果的に、円の中心は (1000, -500) となる) run.followCircleOnTangent(VXV::Position(1000, 0, deg(0)), 1000);
| virtual void RunInterface::stopToLine | ( | const VXV::Position & | position, | |
| const CoordinateCtrl * | crd | |||
| ) | [pure virtual] |
停止直線の指定
指定直線に垂直な直線上で停止
指定直線に垂直な直線上で停止
- Parameters:
-
position [i] 指定直線を指定 crd [i] 座標系
RunCtrl run; run.connect(argc, argv); // 座標系 (1000, 1000) で向き 45度に垂直な直線上で停止 run.stopToLine(Posiiton(1000, 1000, deg(45)));
| virtual void RunInterface::rotateToDirection | ( | const VXV::Direction & | direction, | |
| const CoordinateCtrl * | crd | |||
| ) | [pure virtual] |
指定角度方向に回転
座標系で指定された角度の方を向くように転回する
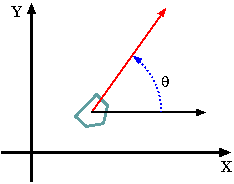
座標系の指定角度へ追従
- Parameters:
-
direction [i] 追従角度 crd [i] 座標系
RunCtrl run; run.connect(argc, argv); // 145度の方向を向く run.rotateToDirection(deg(145));
| virtual void RunInterface::rotateAngle | ( | const VXV::Direction & | direction | ) | [pure virtual] |
指定角度だけ回転
指定された角度だけ相対的に転回する
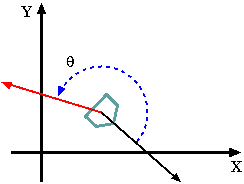
指定角度だけ転回する
- Parameters:
-
direction [i] 回転角度
RunCtrl run; run.connect(argc, argv); // 時計回りに1転回する run.rotateAngle(deg(-360));
| virtual void RunInterface::spin | ( | const VXV::Direction & | velocity | ) | [pure virtual] |
| virtual void RunInterface::lastMoveCommand | ( | const CoordinateCtrl * | crd | ) | [pure virtual] |
過去の移動コマンドを再発行
直前に発行した移動コマンドを再度発行する。発行の際には、過去にコマンドを発行したときの座標系が今も存在するのを確認するために、そのコマンドを発行したときの座標系を指定する必要がある。
- Parameters:
-
crd [i] 座標系
// 移動コマンドの発行 run.followLine(VXV::Position(0, 0, deg(0))); VXV::Delay(1000); // 障害物があった場合など、直前に発行した移動コマンドを待避してから停止 run.push_runState(); run.stop(); VXV::Delay(1000); // 移動コマンドの再発行 run.pop_runState(); run.lastMoveCommand(&run);
| virtual bool RunInterface::isStable | ( | void | ) | [pure virtual] |
移動の制御状態が安定しているかを返す
直線追従であれば、直線上を走行しているとき、停止コマンドであれば、停止しているときに true が返される。現在実行中のコマンドの制御目標を達成しているかどうかを返す
- Return values:
-
true 安定 false 安定にむけて制御中
RunCtrl run; run.connect(argc, argv); // 目的の方向への回転速度がゼロ近くになったら、次の移動コマンドを発行 run.rotateToDirection(deg(90)); while (!run.isStable()) { VXV::Delay(100); } run.followLine(VXV::Position(0, 0, deg(90)));
Implemented in mRunCtrl, and RunCtrl.
Referenced by VXV::waitStable().
| virtual int RunInterface::getLengthToGrid | ( | const VXV::Grid & | grid, | |
| const CoordinateCtrl * | crd | |||
| ) | [pure virtual] |
- Parameters:
-
指定位置と推定自己位置との距離を返す 推定自己位置と、指定座標系の点との距離を返す
距離
- Parameters:
-
grid [i] 指定位置 crd [i] 座標系
- Returns:
- 距離 [mm]
RunCtrl run; run.connect(argc, argv); // 移動しながら、座標 (1000, 1000) との距離を表示し続ける VXV::Grid grid(1000, 1000); run.followLine(VXV::Position(0, 0, deg(0))); while (1) { printf("length: %d\n", run.getLengthToGrid(grid)); VXV::Delay(1000); }
Implemented in RunCtrl.
| virtual int RunInterface::getLengthToBody | ( | const VXV::Grid & | grid, | |
| const CoordinateCtrl * | crd | |||
| ) | [pure virtual] |
指定位置と推定自己位置との距離を返す
- Parameters:
-
grid [i] 指定位置 crd [i] 座標系
- Returns:
- 距離 [mm]
- Attention:
- getLengthToGrid を用いること
Implemented in RunCtrl.
| virtual int RunInterface::getLengthToLine | ( | const VXV::Position & | line, | |
| const CoordinateCtrl * | crd | |||
| ) | [pure virtual] |
指定直線に垂直な直線と推定自己位置との距離を返す
返される値は、指定直線の向きの方に自己位置があれば距離が、指定直線の向きとは反対側に自己位置があれば、距離に負号を付けた値が返される
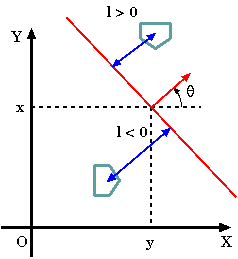
直線との距離
- Parameters:
-
line [i] 指定直線 crd [i] 座標系
- Returns:
- 距離 [mm]
RunCtrl run; run.connect(argc, argv); // 次の移動直線(1000, 0, deg(90))に近づいたらその直線への追従コマンドを発行 VXV::Position next_line(1000, 0, deg(90)); run.followLine(VXV::Position(0, 0, deg(0)); while (run.getLengthToLine(next_line) < -300) { VXV::Delay(100); } run.followLine(next_line);
Implemented in RunCtrl.
| virtual VXV::Direction RunInterface::getAngleToDirection | ( | const VXV::Direction & | t, | |
| const CoordinateCtrl * | crd | |||
| ) | [pure virtual] |
指定角度との差を返す
座標系で指定された角度と推定自己位置の角度との差を返す
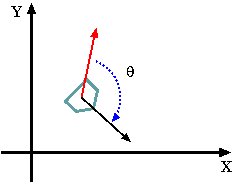
角度差
- Parameters:
-
t [i] 指定角度 crd [i] 座標系
- Returns:
- 角度差
Implemented in RunCtrl.
| virtual int RunInterface::getStraightVelDiff | ( | int | mm_vel | ) | [pure virtual] |
指定並進速度との差を返す
指定した速度と現在の移動速度との差を返す
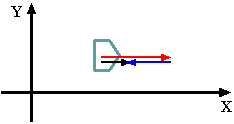
速度差
- Parameters:
-
mm_vel [i] 指定並進速度 [mm/sec]
- Returns:
- 並進速度の差 [mm/sec]
Implemented in RunCtrl.
| virtual VXV::Direction RunInterface::getRotateVelDiff | ( | const VXV::Direction & | t | ) | [pure virtual] |
指定回転速度との差を返す
指定回転速度と現在の回転速度との差を返す
回転速度差
- Parameters:
-
t [i] 指定回転速度 [direction/sec]
- Returns:
- 回転速度の差 [direction/sec]
Implemented in RunCtrl.
| virtual void RunInterface::setStraightRefVel | ( | int | mm_sec | ) | [pure virtual] |
目標並進速度を設定
直線追従や円弧追従などで実現しようとする並進速度を設定する
- Parameters:
-
mm_sec [i] 目標並進速度 [mm]
RunCtrl run; run.connect(argc, argv); // 並進速度を 100[mm/sec]に設定する run.setStraightRefVel(100); run.followLine(VXV::Position(0, 0, deg(0))); // 移動速度は 100[mm/sec]
Implemented in RunCtrl.
| virtual void RunInterface::setStraightRefAcc | ( | int | mm_acc | ) | [pure virtual] |
目標並進加速度を設定
並進速度の制御に用いられる角速度を設定する
- Parameters:
-
mm_acc [i] 目標加速度 [mm]
RunCtrl run; run.connect(argc, argv); // 並進の加速度を 100[mm/sec^2]に設定する run.setStraightRefAcc(100); // 移動の加速度は 100[mm/sec^2] run.followLine(VXV::Position(0, 0, deg(0)));
Implemented in RunCtrl.
| virtual void RunInterface::setRotateRefVel | ( | const VXV::Direction & | rotate_vel | ) | [pure virtual] |
目標角速度を設定
目標角度への追従コマンドや転回コマンドの際に用いられる回転速度を設定する
- Parameters:
-
rotate_vel [i] 目標角速度 [VXV::Direction]
RunCtrl run; run.connect(argc, argv); // 回転角速度を 90[deg/sec]に設定する run.setRotateRefVel(deg(90)); run.rotateAngle(deg(360)); // 回転角速度は 90[deg/sec]
Implemented in RunCtrl.
| virtual void RunInterface::setRotateRefAcc | ( | const VXV::Direction & | rotate_acc | ) | [pure virtual] |
目標角加速度を設定
回転制御の際に用いられる角加速度を設定する
- Parameters:
-
rotate_acc [i] 目標角加速度 [VXV::Direction]
RunCtrl run; run.connect(argc, argv); // 回転角加速度を 90[deg/sec^2]に設定する run.setRotateRefAcc(deg(90)); run.rotateAngle(deg(360)); // 回転角加速度は 90[deg/sec^2]
Implemented in RunCtrl.
| virtual void RunInterface::setCurveRadius | ( | int | mm | ) | [pure virtual] |
追従時の曲率を設定
推定自己位置が目標経路上にない場合、ここで設定される曲率を保ちながら目標経路に追従しようとする。従って、r が小さいほど急激に転回して経路追従を行い、r が大きければなだらかに目標経路に追従する
- Parameters:
-
mm [i] 追従時の曲率 [mm]
RunCtrl run; run.connect(argc, argv); // 追従の曲率を大きめに設定 run.setCurveRadius(600);
Implemented in RunCtrl.
| virtual int RunInterface::getCurveRadius | ( | void | ) | [pure virtual] |
追従時の曲率の設定を取得
現在の設定されている追従時の曲率の値を取得する
- Return values:
-
追従時曲率の設定値 使用例 RunCtrl run; run.connect(argc, argv); // 現在の曲率設定を取得して表示 printf("curve radius: %d\n", run.getCurveRadius());
Implemented in RunCtrl.
| virtual int RunInterface::getStraightVel | ( | void | ) | [pure virtual] |
並進速度の取得
並進速度を取得する
- Return values:
-
並進速度 [mm/sec]
RunCtrl run; run.connect(argc, argv); // 移動速度を表示し続ける run.followLine(Position(0, 0, deg(0))); while (1) { printf("vel: %d\n", run.getStraightVel()); VXV::Delay(100); }
Implemented in RunCtrl.
| virtual VXV::Direction RunInterface::getRotateVel | ( | void | ) | [pure virtual] |
回転速度の取得
回転速度を取得する
- Return values:
-
回転角速度 [VXV::Direction]
RunCtrl run; run.connect(argc, argv); // 移動速度を表示し続ける run.spin(deg(90)); while (1) { printf("vel: %d\n", run.getRotateVel().to_deg()); VXV::Delay(100); }
Implemented in RunCtrl.
The documentation for this class was generated from the following file:
- src/runCtrl/cpp/runInterface.h
