|
趣味で作ってるロボット用ソフトウェア
|
|
趣味で作ってるロボット用ソフトウェア
|
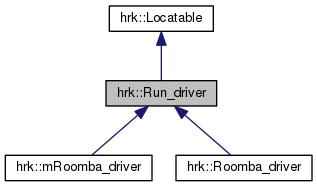
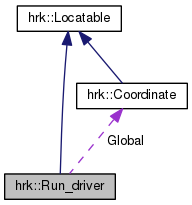
ロボット用インターフェース More...
#include <Run_driver.h>
Public Member Functions | |
| virtual const char * | what () const =0 |
| 状態を示すメッセージを返す More... | |
| virtual void | close ()=0 |
| 接続を閉じる | |
| virtual void | set_connection (Connection *connection)=0 |
| 接続オブジェクトを設定する | |
| virtual Connection * | connection ()=0 |
| 接続オブジェクトを返す | |
| virtual void | set_straight_velocity (double m_per_sec)=0 |
| 並進速度を指定する | |
| virtual double | straight_velocity () const =0 |
| 並進速度を取得する | |
| virtual void | set_rotate_velocity (const Angle &angle_per_sec)=0 |
| 回転角速度を指定する | |
| virtual Angle | rotate_velocity () const =0 |
| 回転角速度を取得する | |
| virtual void | set_straight_acceleration (double m_per_sec2)=0 |
| 並進加速度を指定する | |
| virtual void | set_rotate_acceleration (const Angle &angle_per_sec2)=0 |
| 回転角加速度を指定する | |
| virtual PositionF | position (const Locatable *coordinate=Global) const =0 |
| 推定自己位置の取得 More... | |
| virtual void | set_position (const PositionF &position, const Locatable *coordinate=Global)=0 |
| 位置の登録 | |
| virtual double | path_change_distance ()=0 |
| 経路の切替えが適切に行える最短距離を返す | |
| virtual bool | is_stable ()=0 |
| 移動コマンドの動作が安定したかを返す | |
| virtual void | follow_line (const PositionF &line, const Locatable *coordinate=Global)=0 |
| 追従させる直線を指定する More... | |
| virtual void | follow_circle (const PointF ¢er, double radius, const Locatable *coordinate=Global)=0 |
| 追従させる円を指定する More... | |
| virtual void | stop_to_line (const PositionF &line, const Locatable *coordinate=Global)=0 |
| 直線上で停止させる More... | |
| virtual void | spin (const Angle &spin_angle)=0 |
| 指定した角度だけ回転させる | |
| virtual void | spin_to_direction (const Angle &target_angle, const Locatable *coordinate=Global)=0 |
| 指定した向きで停止させる More... | |
| virtual void | stop ()=0 |
| 停止させる | |
| virtual double | distance_to (const PointF &point, const Locatable *coordinate=Global)=0 |
| 点とロボットとの距離を返す | |
| virtual double | distance_to_perpendicular (const PositionF &line, const Locatable *coordinate=Global)=0 |
| ベクトルの始点を通る垂線とロボットとの距離を返す More... | |
| virtual Angle | angle_to (const Angle &angle, const Locatable *coordinate=Global)=0 |
| 向きとロボットとの角度差を返す | |
Static Public Attributes | |
| static Coordinate * | Global = NULL |
ロボット用インターフェース
|
pure virtual |
|
pure virtual |
追従させる直線を指定する
| [in] | line | 追従させる直線 |

Implemented in hrk::Roomba_driver, and hrk::mRoomba_driver.
|
pure virtual |
追従させる円を指定する
| [in] | center | 円の中心位置 |
| [in] | radius | 円の半径 (正の値: 反時計回り, 負の値: 時計回り) |

Implemented in hrk::Roomba_driver, and hrk::mRoomba_driver.
|
pure virtual |
直線上で停止させる
| [in] | line | 停止させる直線からの垂線。角度で停止させたい向きを指定する。 |

Implemented in hrk::Roomba_driver, and hrk::mRoomba_driver.
|
pure virtual |
指定した向きで停止させる
| [in] | target_angel | 停止させる向き |

Implemented in hrk::Roomba_driver, and hrk::mRoomba_driver.
|
pure virtual |
ベクトルの始点を通る垂線とロボットとの距離を返す
垂線のベクトルが向いている側とは反対の方向にロボット位置がある場合は、返される距離は負の値になる。

Implemented in hrk::Roomba_driver, and hrk::mRoomba_driver.
 1.8.6
1.8.6


