ルンバの制御
More...
#include <Roomba_driver.h>
|
| const char * | what () const |
| | 状態を示すメッセージを返す More...
|
| |
| bool | open (const std::string &device_name, bool do_open=true) |
| | 接続を開く More...
|
| |
|
void | close () |
| | 接続を閉じる
|
| |
|
Connection * | connection () |
| | 接続オブジェクトを返す
|
| |
|
void | set_connection (Connection *connection) |
| | 接続オブジェクトを設定する
|
| |
|
void | set_straight_velocity (double m_per_sec) |
| | 並進速度を指定する
|
| |
|
double | straight_velocity () const |
| | 並進速度を取得する
|
| |
|
void | set_rotate_velocity (const Angle &angle_per_sec) |
| | 回転角速度を指定する
|
| |
|
Angle | rotate_velocity () const |
| | 回転角速度を取得する
|
| |
|
void | set_straight_acceleration (double m_per_sec2) |
| | 並進加速度を指定する
|
| |
|
void | set_rotate_acceleration (const Angle &angle_per_sec2) |
| | 回転角加速度を指定する
|
| |
| PositionF | position (const Locatable *coordinate=Global) const |
| | 推定自己位置の取得 More...
|
| |
|
void | set_position (const PositionF &position, const Locatable *coordinate=Global) |
| | 位置の登録
|
| |
|
double | path_change_distance () |
| | 経路の切替えが適切に行える最短距離を返す
|
| |
|
bool | is_stable () |
| | 移動コマンドの動作が安定したかを返す
|
| |
| void | follow_line (const PositionF &line, const Locatable *coordinate=Global) |
| | 追従させる直線を指定する More...
|
| |
| void | follow_circle (const PointF ¢er, double radius, const Locatable *coordinate=Global) |
| | 追従させる円を指定する More...
|
| |
| void | stop_to_line (const PositionF &line, const Locatable *coordinate=Global) |
| | 直線上で停止させる More...
|
| |
|
void | spin (const Angle &spin_angle) |
| | 指定した角度だけ回転させる
|
| |
| void | spin_to_direction (const Angle &target_angle, const Locatable *coordinate=Global) |
| | 指定した向きで停止させる More...
|
| |
|
void | stop () |
| | 停止させる
|
| |
|
double | distance_to (const PointF &point, const Locatable *coordinate=Global) |
| | 点とロボットとの距離を返す
|
| |
| double | distance_to_perpendicular (const PositionF &line, const Locatable *coordinate=Global) |
| | ベクトルの始点を通る垂線とロボットとの距離を返す More...
|
| |
|
Angle | angle_to (const Angle &angle, const Locatable *coordinate=Global) |
| | 向きとロボットとの角度差を返す
|
| |
|
bool | sleep () |
| | 省電力な状態への遷移
|
| |
|
bool | wake_up () |
| | 省電力な状態からの復帰
|
| |
|
bool | power_down () |
| | 電源を切る
|
| |
|
bool | dock () |
| | 充電の開始を指示
|
| |
|
bool | is_charging () |
| | 充電中かを返す
|
| |
|
int | charged_percent () |
| | 充電されている割合をパーセントで返す
|
| |
| void | set_vacuum (bool on=true) |
| | 掃除機能の On/Off を設定する More...
|
| |
|
void | control_wheel_velocity (double right_m_per_sec, double left_m_per_sec) |
| |
|
| enum | { Unknown = -1
} |
| |
|
static Coordinate * | Global = NULL |
| |
| const char * Roomba_driver::what |
( |
void |
| ) |
const |
|
virtual |
| bool Roomba_driver::open |
( |
const std::string & |
device_name, |
|
|
bool |
do_open = true |
|
) |
| |
| void Roomba_driver::follow_line |
( |
const PositionF & |
line, |
|
|
const Locatable * |
coordinate = Global |
|
) |
| |
|
virtual |
| void Roomba_driver::follow_circle |
( |
const PointF & |
center, |
|
|
double |
radius, |
|
|
const Locatable * |
coordinate = Global |
|
) |
| |
|
virtual |
| void Roomba_driver::stop_to_line |
( |
const PositionF & |
line, |
|
|
const Locatable * |
coordinate = Global |
|
) |
| |
|
virtual |
| void Roomba_driver::spin_to_direction |
( |
const Angle & |
target_angle, |
|
|
const Locatable * |
coordinate = Global |
|
) |
| |
|
virtual |
| double Roomba_driver::distance_to_perpendicular |
( |
const PositionF & |
line, |
|
|
const Locatable * |
coordinate = Global |
|
) |
| |
|
virtual |
| void Roomba_driver::set_vacuum |
( |
bool |
on = true | ) |
|
掃除機能の On/Off を設定する
- Parameters
-
| [in] | on | On: true, Off: false |
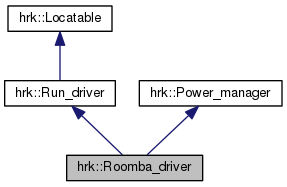
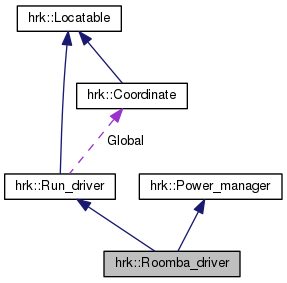
The documentation for this class was generated from the following files:
 Public Types inherited from hrk::Power_manager
Public Types inherited from hrk::Power_manager




 1.8.6
1.8.6


