走行制御ライブラリ
走行制御ライブラリ実装に伴う、ライブラリ開発者向けドキュメント
制御レイヤー構成
走行制御システムは、複数レイヤーから成る。ホスト環境で動作するのは「ユーザアプリケーション」レイヤーであり、それ以下のレイヤーはターゲット環境にて動作する。
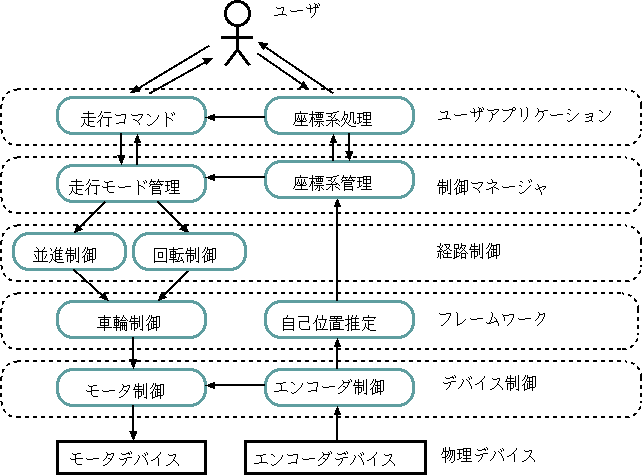
制御レイヤー構成
各レイヤーの意味は「リアルタイムシステム実現のための自立オブジェクト指向」(岩橋正実), CQ出版 を参考にすること。
vxv_tools/src/runCtrl/tRunCtrl のソースコードのレイヤー所属を以下に示す。
整数型の算術関数
通信まわり
タスク管理
走行モード管理
並進制御・回転制御
自己位置推定
車輪制御
モータ制御
- motorCtrl.h
エンコーダ制御
以上
三角関数のテーブル作成
自己位置計算等の計算に用いられる整数型の三角関数は、テーブルによって実装される。このテーブルは Ruby スクリプトの create_isincos.rb によって行われ、そのテーブルの分解能、すなわちテーブルサイズは変更可能である。
#!/usr/bin/ruby # # isin(), icos() を作るためのスクリプト # Satofumi KAMIMURA # $Id$ # 絶対値の最大値、角度分割数の設定 angle_div = 65536 # [0, 65535] divid_shift = 15 divid_max = 1 << divid_shift # [-32767, +32767] angle_quad = angle_div >> 2 # 分割具合の設定 (0で誤差なし) #table_shift_value = 5 table_shift_value = 0 if ARGV[0] == "header" print <<-"EOB" #ifndef I_SIN_COS_H #define I_SIN_COS_H enum { ISINCOS_ANGLE_DIVIDED = #{angle_div}, /* [0, #{angle_div}] */ ISINCOS_VALUE_MAX = #{divid_max}, /* [-#{divid_max}, +#{divid_max}] */ ISINCOS_VALUE_SHIFT = #{divid_shift}, }; #include "cpp_extern_macro.h" BEGIN_C_DECLS; extern int isin(unsigned short div16); extern int icos(unsigned short div16); END_C_DECLS; #endif /* !I_SIN_COS_H */ EOB exit end # テーブル部分の出力 # get this file name __FILE__ =~ /\/*(.+)$/ thisFile = $1 print <<-"EOB" /* \\brief 整数型の sin, cos 関数 This program generated by #{thisFile} \\author Satofumi KAMIMURA $Id$ angle_max = #{angle_div-1} divid_max = #{divid_max} */ #include "isincos.h" static unsigned short sin_table[] = { EOB # 中の数値の表示 for i in 0 .. angle_div.to_i if i > (angle_quad.to_i >> table_shift_value) break end sin_val = divid_max.to_i \ * Math::sin((2.0 * Math::PI * (i << table_shift_value).to_f / angle_div.to_f)) print ' ', sin_val.to_i, ',' if (i+1) % 10 == 0 print "\n" end end print "};\n\n" # isin(), icos() の部分の出力 print <<-"EOB" static int sin_table_func(int n) { EOB if table_shift_value == 0 print " return sin_table[n];\n" else print " return sin_table[n >> #{table_shift_value}];\n" end print <<-"EOB" } int isin(unsigned short div16) { int ret; if (div16 <= #{angle_quad}) { ret = sin_table_func(div16); } else if (div16 <= #{2 * angle_quad}) { ret = sin_table_func(#{2 * angle_quad} - div16); } else if (div16 <= #{3 * angle_quad}) { ret = -sin_table_func(div16 -#{2 * angle_quad}); } else { ret = -sin_table_func(#{4 * angle_quad} - div16); } return ret; } int icos(unsigned short div16) { div16 += #{3 * angle_quad}; EOB if angle_div-1 != 0xffff print " div16 &= #{angle_div - 1};\n" end print <<-"EOB" return -1 * isin(div16); } EOB
テーブルサイズが小さい状態において精度が要求される場合には、テーブル間の値を線形補間等で計算すべきである。テーブル生成は、整数型の atan() の生成にも用いられている。
以上
通信仕様
ホスト側(PC)からターゲット(SH7045F)側に送るデータの種類について定義を行う。通信の種類
ホスト側からターゲットへの通信は、以下の3種類とする。- 走行コマンドの送受信
- SCIP 規格の V コマンドを送信、応答を受け取る
- S-format のファイルを送信、ターゲットの制御プログラムを上書き
これらの通信規格については相互に関連性がないため、ターゲットに送信する側のプログラムは、必要な規格のプロトコルのみ扱えればよいとする。 これは、ターゲット側が受動的であり、メッセージを動的にホスト側に返すことがない、という仮定において成り立つ。
走行コマンドの送受信
走行制御コマンドのための通信規格であり、通信のエラー検出やパケットの再送機能を持つ。 通信規格は、走行コマンド用通信 にて述べる。SCIP規格パケットの送受信
通信デバイスの先に繋がっているのが何かを識別するために、SCIP 規格における V コマンドが実装されるとする。V コマンドの定義は以下の通り。

ホストからターゲットへの V コマンドパケット
ターゲットからホストへの応答
走行制御コントローラを識別するための情報として、ターゲットから送られるファームウェアバージョンの情報に "tRunCtrl" なる文字列を含めることとする。
S-Formatファイルの送信
通常の S-Formatファイル、つまり "S" から始まる文字列を送信することで、プログラムを RAM上にプログラムを配置し、転送後に実行されるとする。 転送先の RAM 番地の定義は、ターゲット側のファームウェアで任意に決定してよい。
走行コマンド用通信
ライブラリ(PC) とコントローラ(SH7045F)間で通信するデータの種類、及び通信のパケット形式について規定する。通信設定
通信デバイスにはシリアルデバイスを用いるが、SH7045F側に USB-Serial変換チップを搭載することにより、ホスト側での USB デバイスを用いた通信をサポートする。通信形式は、115200 bps, 8bit, ignore-parity, 1stop-bit とする。
通信の種類
通信の種類は、- 通信先デバイスの構造体データを取得する
- 通信先デバイスの構造体データを更新する
であるとし、上記の各々の通信に対して以下の機能を持つとする。
- 受信データのエラーを検出し、受信エラーを返す機能
- 応答のタイムアウトを検出し、要求を再送する機能
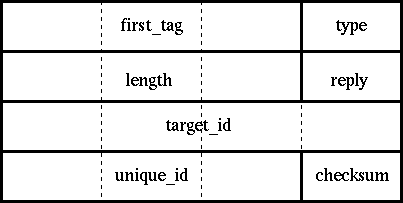
パケット形式
ヘッダ部
- first_tag … パケット開始位置を識別するための固定タグ
- type … 読み込み、書き込み、イベント通知、応答を識別するタグ
- length … パケット長
- unique_id … ユニークIDを持つ
- reply … 応答コードを持つ
- target_id … アクセスする構造体への識別IDを持つ
- header_checksum … ヘッダ部のみのチェックサムを持つ
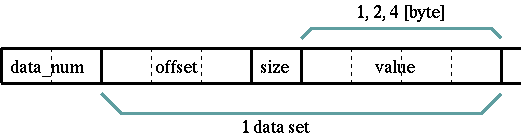
データ部
- data_num … データ組の数
- データ組
- data_offset … アクセス構造体へのオフセット
- data_size … アクセスする変数のバイト数
- data_value(1,2,4 byte) … 更新する変数の値(読み込み時もダミーデータを持つ)
フッタ部
- checksum … 以上のチェックサム
追加パケット
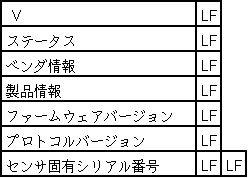
ただし、これ以外にも SKIP の V コマンドのみは処理できなければならない。 V コマンドとは、"V\r\r"
からなる文字列であり、応答として
"V\r"
"ステータス" "\r"
"ベンダ情報" "\r"
"製品情報" "\r"
"ファームウェア情報" "\r"
"プロトコルバージョン" "\r"
"センサ固有シリアル番号" "\r\r"
という文字列を返す。
トランザクション
要求に対して応答が帰ってきた時点で、一連の通信を完了する。基本的に、要求はライブラリ側からしか発生しない。
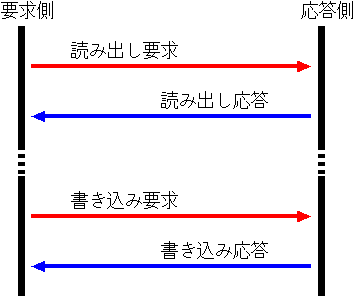
通信時の手順を書き出すと以下の通り。
要求送信(要求側)
- 要求毎に従ったフォーマットでパケットを作成し、応答側に送信する
- 要求の送信毎に、受信バッファ、送信バッファをクリアする
- 要求のパケット毎に、unique_id の一意性を保証する
要求受信(応答側)
- ヘッダ部の checksum を用いてヘッダ情報の正当性を確認する
- ヘッダ部の checksum に失敗した場合、そのパケットは棄却する
- パケットが棄却された場合、受信バッファから first_tag の探索を行う
- 過去に処理した unique_id にて要求が送られてきた場合、その要求は無視する
- 応答側は、type によって要求の種別を判断する
- target_id の指定する構造体が存在しない場合、エラー応答を返す
- パケットの checksum を行い、パケットの正当性を確認する
- パケットの checksum に失敗した場合、パケットを棄却し、エラー応答を返す
- 要求に対するデータ処理を行い、reply に正常終了を格納して応答パケットを返す
応答受信(要求側)
- ヘッダ部の checksum を用いてヘッダ情報の正当性を確認する
- ヘッダ部の checksum に失敗した場合、そのパケットは無視する
- 応答のタイムアウトが発生した場合、要求パケットを再送する
- エラー応答を受信した場合、要求パケットを再送する
- 再送時には、unique_id は更新しない
- 応答の unique_id が要求時の unique_id と異なる場合、その応答は無視する
- 要求パケットの再送は、一定回数であきらめ、通信失敗をユーザに返す
- パケットの checksum を行い、パケットの正当性を確認する
- パケットの checksum に失敗した場合、パケットを棄却し、エラー応答を返す
- 応答に対するデータ処理を行い、正常終了をユーザに返す
以上
書き込み応答への遅延評価
ライブラリ側からの書き込み要求に対し、処理が正常に行われれば、ターゲット側は書き込み応答を返す。ライブラリ側はこの応答を読み捨てて次の処理を行う。また、応答が一定時間内に届かなかった場合は、先に出した書き込み要求を再度発行する必要がある。
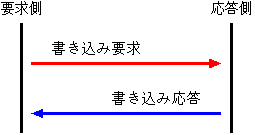
正常時の書き込みトランザクション
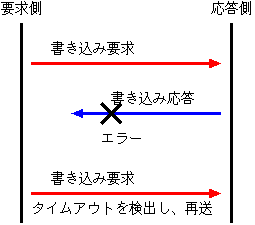
タイムアウトにより、書き込み要求の再送を行った場合
つまり、書き込み要求の応答が正常に戻ってくる、という仮定の下では、書き込み応答パケットを待つ必要はない。以下では、書き込み応答の評価を先送りする場合の実装例について述べる。
書き込み応答の不到着を検出
書き込み応答の遅延評価を行う場合の処理としては、- 書き込み要求の送信後
- 受信すべきユニークID のパケット、そのときに送信したパケットの内容を保持
- 応答の到着を待たずに送信処理から戻る
- 以後の通信トランザクションにて、パケットを受信したとき
- 保持中のパケットのユニークID と一致すれば、その送信トランザクションは完了
- 時系列的に届くはずのパケットの次のパケットのユニークID が届いた場合
- とどいたユニークID までの送信コマンドを再送
という手順を取る。書きコマンドを2つ転送し、応答を待っている場合の保持パケットのイメージは以下の通り。待機中のパケットと到着したユニークID の評価は、キューの先頭から行われる。
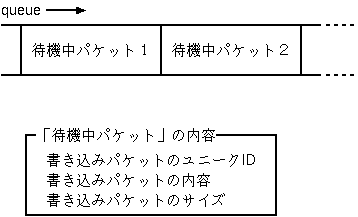
保持中の書き込みパケット
上記実装の問題点を以下にあげる。
- 応答の評価が次コマンド発行時になるため、タイムアウト評価が遅れうる
- リアルタイム性の保証の消失
- 書き込みの再送を行ったときに、想定した動作になるかの保証がない
従って、上記実装はオプションで切り替えられるとし、通信時間の遅延が極端に気になる場合に用いるとよい。
